4.3. Die Calcarbogen-Funktion
4.3.1. Zusammenfassung
Es handelt sich um einen Übergang, dessen Krümmung ab einem Punkt der Verankerungszone bis zum Sockel der Halskupplung mit dem Kopf regelmässig variiert. Die Modellierung des vorhergehenden SL-Schafts ging nur bis zum zylinderförmigen Halssockel.
Die Modellierung, die ich für den vorherigen AlloClassic-Schaft genommen habe, hatte die Form einer Hyperbel und verband einen Punkt in der Verankerungszone mit der Basis des Halses, der zylindrisch blieb. ( Patent Deckner vom 14 10 1987 )
Bei SL Plus-Schäften wird die Calcar-Kurve selbst mathematisch durch eine Exponentialfunktion modelliert, die sich bis zur Basis des Kugelkopfes erstreckt.
4.3.2. Die Kalkarübergangskurve
Diese Funktion ist eine der Komponenten des Calcar-Polynom-Deckner
Der Übergang zwischen Verankerungsbereich und Hals des 1992 SL Plus Schaftes wurde im Vergleich zu den 1984 SL Schaft deutlich verbessert.
Im Gegensatz zu den Hunderten von Hüftprothesenmodellen auf dem Markt, deren Übergang ein einfacher Kreisbogen ist, der in wenigen Minuten definiert und gezeichnet werden konnte, hat die Forschungs- und Programmierarbeit der folgenden Kurven Hunderte von Stunden in Anspruch genommen.
Ich suchte nach einer mathematischen Modellierung einer gekrümmten Bahn und simulierte die reale Kurve, die durch die Richtung der Kompressionen erzeugt wird, denen der Knochen an allen Punkten der Weg ausgesetzt ist. (siehe 3.2.6. Übergangskurven)
4.3.3. Die ideale Kurve bestimmt automatisch ihre Parameter
Da die Parameter dieser Kurve nicht im Voraus bestimmt werden können, habe ich mich dafür entschieden, sie automatisch per Programm festzulegen, indem ich aufeinanderfolgende Tests durch Iterationen der Berechnung simulierte.
Das Programm bestimmt die Parameter der Kurve in jedem Berechnungszyklus, ähnlich wie bei einem Raketenschuss, indem es nach der Dichotomie zwischen den Abweichungen der vorherigen Tests und der idealen Richtung am Treffpunkt mit dem Bereich unmittelbar an der Basis des Verbindungskegels vorgeht mit dem Kugelkopf, bis die Winkelabweichung einen im Voraus genau festgelegten Grenzwert unterschreitet.
Anschließend wurde im Jahr 2002 anlässlich eines anatomischen Prothesenprojekts ( Anatomica Nova ) nicht nur die Antetorsion, sondern erstmals auch die Vorwärtsverschiebung der Halsachse im Verhältnis zur Femur-Achse berücksichtigt Bei der Modellierung habe ich den Prozess auf die Simulation der Trajektorie der Knochenstruktur durch nichtplanare Trajektorien in einem dreidimensionalen Raum verallgemeinert.
4.3.4. Mathematische Details der Calcarbogenfunktion
Im Gegensatz zur Calcar-Kurve des AlloClassic-Schafts, die ich mathematisch durch einen Hyperbelbogen modelliert habe, hat die Calcar-Kurve der SL Plus-Schäfte die Struktur einer Exponentialkurve. Die Hyperbel des AlloClassic endete an der Basis des Halses, im Gegensatz zur Exponentialfunktion des SL Plus, die bis zur Basis des Kegels reichte. Der zylindrische Hals nicht mehr vorhanden war.
Bei der Beschreibung mehrerer Prothesen habe ich oft die vorteilhaften Eigenschaften von Exponentialkurven im Intervall [0,1] genutzt.
Nahe Null haben diese Kurven immer eine erste Ableitung von Null. Die entsprechende Zusammensetzung mehrerer dieser Kurven weist eine stetige zweite Ableitung auf.
Nahe 1 variiert die Steigung (erste Ableitung) dieser Kurven kontinuierlich von 1 bis unendlich, wenn der Exponent reell und nicht wie gewöhnlich ganzzahlig ist. Darüber hinaus variiert ihre Krümmung (zweite Ableitung) kontinuierlich.
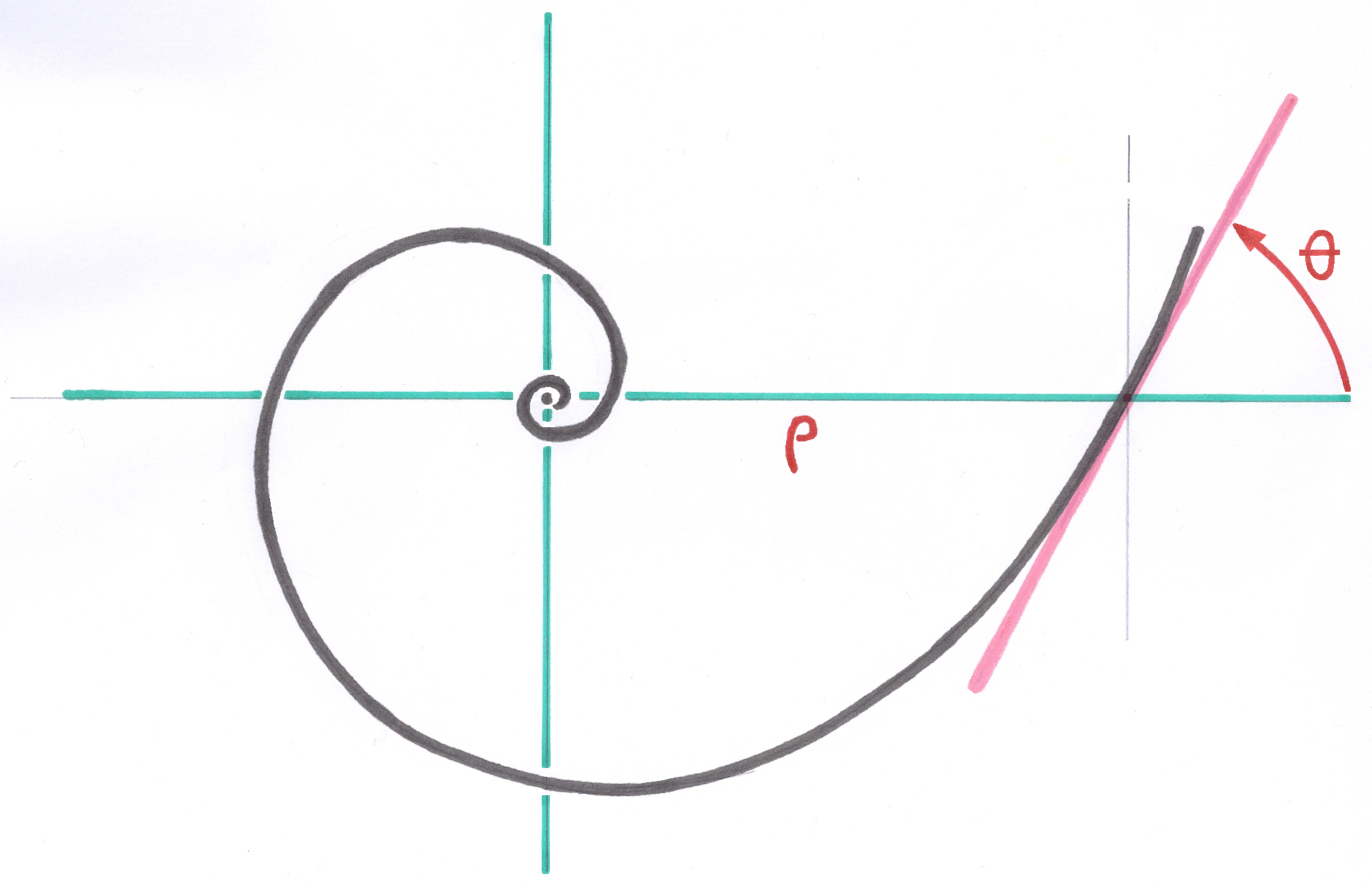
Nachfolgend Beispiele für Kurven in einer traditionellen orthonormalen Darstellung, dann in einem nicht orthonormalen lokalen Koordinatensystem, versetzt vom Ursprung:
Für den „Calcar“-Bereich wird diese Exponentialkurve nicht im (orthonormalen) kartesischen Koordinatensystem beschrieben, das nach Abschluss der Berechnung den gesamten Stab enthält, sondern in einem nicht orthonormalen lokalen Koordinatensystem.
Dieses lokale Koordinatensystem „U,V“ ist spezifisch für die zu berechnende Prothesengröße und seine Basisvektoren unterliegen den Wachstumsfaktoren, die die Gesamtlänge, Breite und Halslänge entsprechend dieser Größe bestimmen. Der Einheitsvektor der „Abszisse“ liegt auf der Längsachse und der Vektor der Ordinaten auf der Halsachse. Der Winkel zwischen diesen beiden Vektoren ist also der Halswinkel.
Die Einheitslänge des „U“ wird durch einen Teil der Länge der Verankerungszone parametrisiert, der durch einen „Prozentsatz“ definiert wird, der allen in der Systemparameterbasis gefundenen Größen gemeinsam ist, während die Einheitslänge des „V“ durch a parametrisiert wird Teil der Halslänge, mit einem anderen Parameter.
Der nützliche Teil der Kurve befindet sich im „Einheitsparallelogramm“, das durch die Einheitsvektoren der lokalen Koordinaten begrenzt wird. Die Krümmung dieses exponentiellen Teils und insbesondere der Winkel seiner Tangente am Punkt 1.1 (an der Basis des Kopfkegels) der lokalen Koordinaten variieren je nach der auf die Funktion angewendeten Potenz. Diese Potenz ist nicht ganzzahlig wie die Exponenten klassischer Polynome, sondern „reell“ wie alle Exponenten des Deckner-Polynoms.
Es ist dieser Exponent, der durch eine bestimmte Anzahl (nicht im Voraus definierter) Iterationen des Programms angepasst wird, die es ermöglicht, die Basis des Halses zu treffen und eine perfekte Ausrichtung mit der verdünnten Zone an der Basis des Kegels zu erreichen Verbindungsstelle, die den Keramikkopf aufnehmen soll. (Der Durchmesser dieser verdünnten Zone wird für jede Größe auch durch einen Wachstumsfaktor parametrisiert).
Erst dann wird die so für jede Größe berechnete Calcar-Bogenfunktion in das Koordinatensystem jeder Größe projiziert und wird zu einem der additiven Elemente des Deckner-Calcar-Polynoms.
Hierbei handelt es sich um einen Übergang, dessen Krümmung von einem Punkt in der Verankerungszone bis zur Basis des Verbindungshalses mit dem Kopf regelmäßig variiert, wobei die beim vorherigen ZM-Schaft übernommene Modellierung an der Basis des zylindrischen Halses endet.
----