4.3. The Calcar Arc Function
4.3.1. Summary
The Calcar Arc is the transition curve between the anchoring zone of the stem and the direction of the neck axis and the prosthetic head.
Modeling that I had adopted for the preceding AlloClassic stem the form of hyperbole and connected a point of the anchoring zone with the base of the collar which remained cylindrical.( Patent Deckner 14 10 1987 )
In stems SL Plus, the Calcar-Curve itself is modelled mathematically by an exponential function extending until to the base of the spherical head.
4.3.2. The Transition Calcar-Curve
It is about one of the components of the Calcar-Polynom-Deckner.
The transition between the anchoring zone and the neck from stem SL Plus 1992 was improved compared to stems SL of 1984. Unlike to the hundreds of models of prosthesis of hip of the market, from which the transition is a simple arc of circle, which one could define and draw in a few minutes, the research task and programming of the curves below required hundreds of hours. I sought a mathematical modeling of a curved trajectory, simulating the real curve generated by the direction of the compressions undergone by the bone in all points of the course. (see 3.2.6. Transition Curves)
4.3.3. The ideal curve defines automatically its parameters
As the parameters of this curve cannot be given in advance, I chose automatically to establish them automatically by program, by simulating the successive tests by iterations of calculation.
The program determines the parameters of the curve, with each cycle of calculation, the way of a test of missile shooting, while proceeding by dichotomy between the variations of the preceding tests and the ideal direction to the point of meeting with the zone immediately to the base of the cone of junction with the spherical head, until the angular variation is lower than a precise limit fixed in advance. Thereafter, in 2002, at the time of an anatomical project of prosthesis ( Ana.Nova ), in which not only the antetorsion, but also for the first time, the shift forward of the neck axis compared to the axis of the femur was taken into account in modeling, I generalized the process with the simulation of the trajectory of the osseous trabeculae by nonplane trajectories, in a 3D space.
4.3.4. Mathematical details of the calcar arc function
Differently of the curve of calcar of the AlloClassic stem that I mathematically modelled by a hyperbole arc, the calcar curve of stems SL Plus has the structure of an exponential curve. The hyperbole of AlloClassic led to the base of the collar contrary to exponential of the SL Plus which goes until the base of the cone, the cylindrical collar no longer existing.
In the description of several prostheses, I often used the interesting properties of the exponential curves in the interval [0, 1].
In the vicinity of 1, the slope ( first derivative ) of these curves varies uninterrupted from 1 ad infinite when the exponent is Real and not Integer as usual.
Moreover, their curvature ( second derivative ) varies continuously. In the vicinity of zero, these curves always have a first derivative null. The suitable composition of several of these curves has a second derivative continuous.
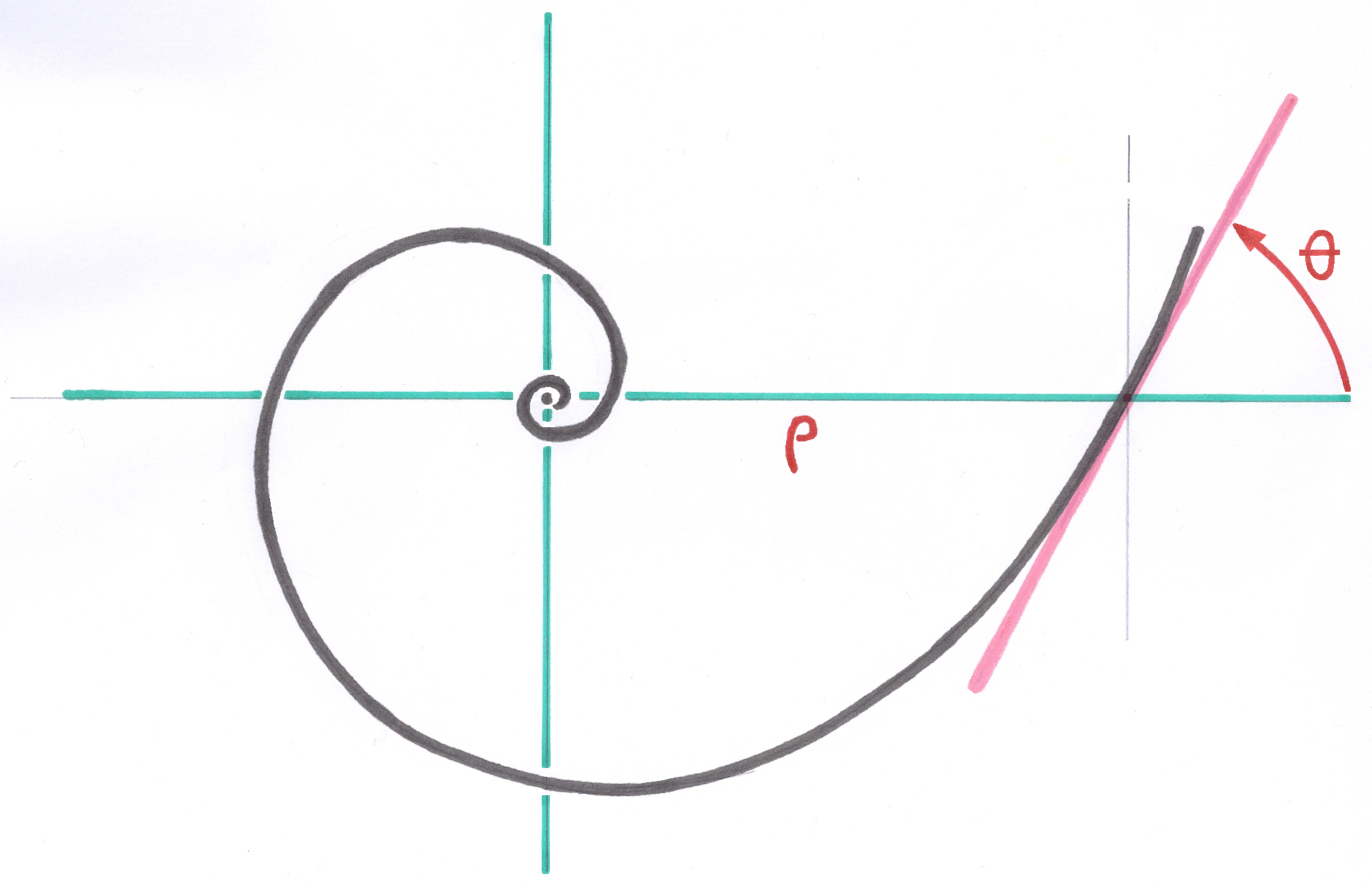
Below, examples of curves in a traditional orthonormed representation, then in a not orthonormed local frame of reference, shifted compared to the origin:
For the zone of the “Calcar”, this exponential curve is described not in the Cartesian rthonormed frame of reference which will contain the totality of the stem once its calculation will be finished, but in a not orthonormed local frame of reference.
This local frame of reference” U, V ” is specific to the size of prosthesis in the course of calculation and its basic vectors are controlled by the Growing Factors which govern the overall length, the width, and the length of collar, corresponding to this size. The vector-unit of the “abscissa” is on the longitudinal axis, and the vector of the ordinates on the axis of the neck. So, the angle between these two vectors corresponds to the angle of the neck.
The unit length of “U” is parameterized by a portion length of the zone of anchoring defined by a “percentage” common to all the sizes being in the base of parameters of the system, while the unit length of “V” is parameterized by a portion length of the neck, with a different parameter.
The useful portion of the curve is in the “unitary parallelogram” delimited by the unit vectors of local coordinate. The curvature of this portion of exponential, and especially the angle of its tangent as in point 1,1 (located at the base of the cone of the head) of the local coordinates vary according to the power applied to the function. This power is not Integer like the exponents of the traditional polynomials but “Real”, like all the exponents of the Deckner Polynom.
It is this exponent who is adjusted by a certain number (non defined in advance) of iterations of the program which makes it possible to meet the base of the neck and obtain a perfect alignment with the thin zone located at the base of the junction cone which will receive the ceramic head. The diameter of this zone is also parameterized for each size by a growing factor.
It is only then that the calcar arc function thus calculated for each size will be projected in the frame of reference of each size and will become one of the additive elements of Calcar Polynom Deckner. This is a transition whose curvature varies regularly since a point of the anchoring zone until the base of the cone of junction with the head, the modeling adopted in preceding stem SL stopping at the base of the cylindrical neck.
----