5.4. Genou DECKNER -GF
( Growing Factors ) , projet
5.4.1. Sujet de la recherche
La recherche d'une géométrie à grand débattement et simultanément autostabilisante a été à l'origine de l'étude de cette nouvelle prothèse de genou
Après avoir obtenu un grand succès avec la prothèse de genou GSB en tant que directeur de la filiale française d'AlloPro ( 1978-1992 )et avoir participé de façon stérile à plus de 600 premières implantations de genou et 1400 implantations de hanche,incluant la préparation préalable des orthopédistes, j'ai accumulé l'expérience nécessaire pour la création de nouveaux implants. Ma formation d'ingénieur, d'informaticien et d'infirmier m'ont permis de mener l'étude de ce genou de la réflexion jusqu'aux fichiers numériques prêts pour la production.
La recherche de couples de surfaces de glissement ayant la propriété de rappel naturel vers la position d'extension, de recentrage antéro-postérieur et médial-latéral m'a amené aux résultats suivants:
5.4.2. Le contour antéro-postérieur du fémur
Le contour antéro-postérieur du fémur ne doit plus être un assemblage d'arcs de cercle successifs, mais doit comporter une courbure dont la variation est continue avec une très faible courbure dans la direction de l'extension.
Cette courbe peut être obtenue dans les codes informatiques en faisant évoluer des arcs de cercle par application à leurs composantes trigonométriques des puissances réelles et non entières.
Courbure des condyles variant de façon continue avec représentation des rayons de courbure calculés en chaque point
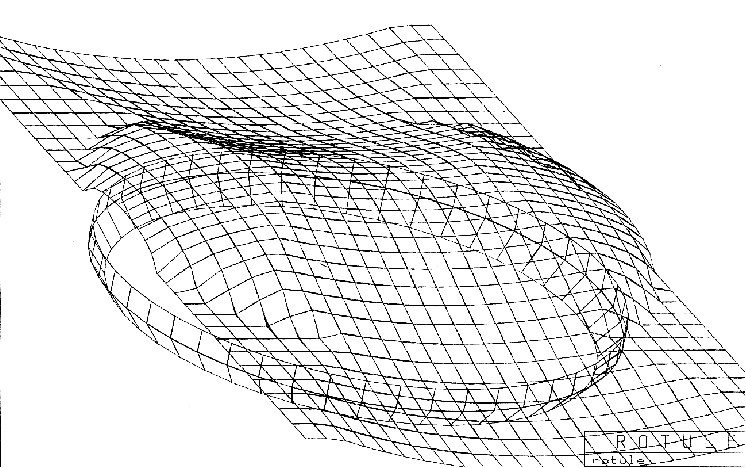
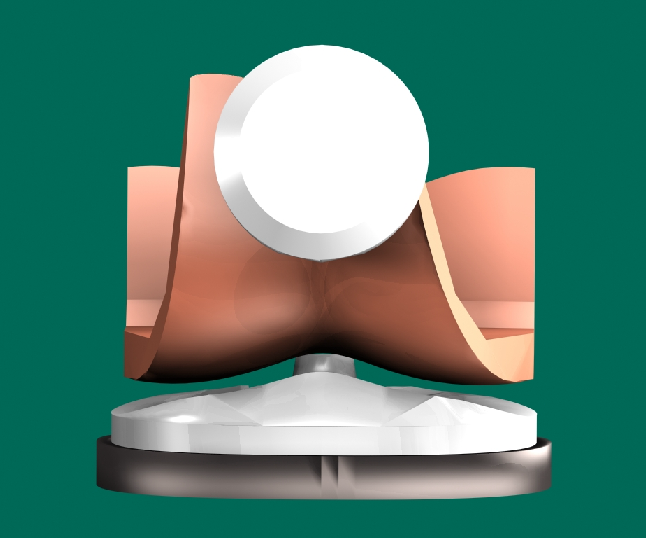
5.4.3. La section frontale du fémur
C'est cette "section frontale" qui présente la plus forte innovation de cette prothèse de genou. La formulation idéale de cette courbe m'est apparue en observant la plus grande stabilité d'une boule au fond d'un bol sphérique d'un rayon légèrement supérieur au rayon de la boule. Le rappel vers le centre augmente rapidement quand la boule s'écarte du centre du bol du fait de l'augmentation de la pente entre les deux surfaces voisines. Néanmoins, plus on s'approche du point le plus bas du bol, plus le mouvement reste relativement libre. L'énergie potentielle est la plus basse quand la boule se trouve au fond du bol. Dans un genou équipé d'une prothèse totale, cette énergie potentielle est représentée par la tension de l'ensemble des ligaments (ceux laissés en place après l'opération ou la maladie). Cette énergie est minimale quand les ligaments sont détendus et le genou en position de repos, c'est-à-dire centré et en extension.
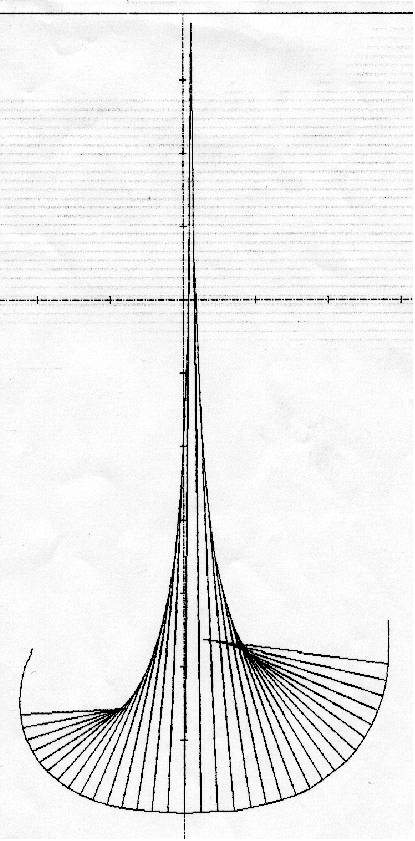
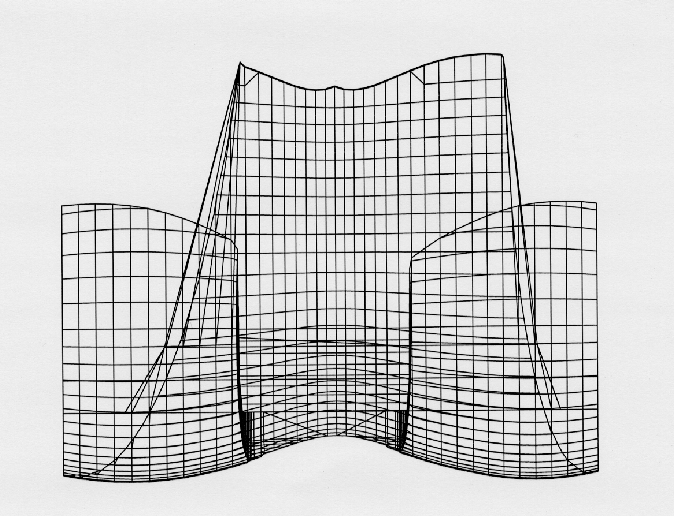
Première représentation de la surface de glissement
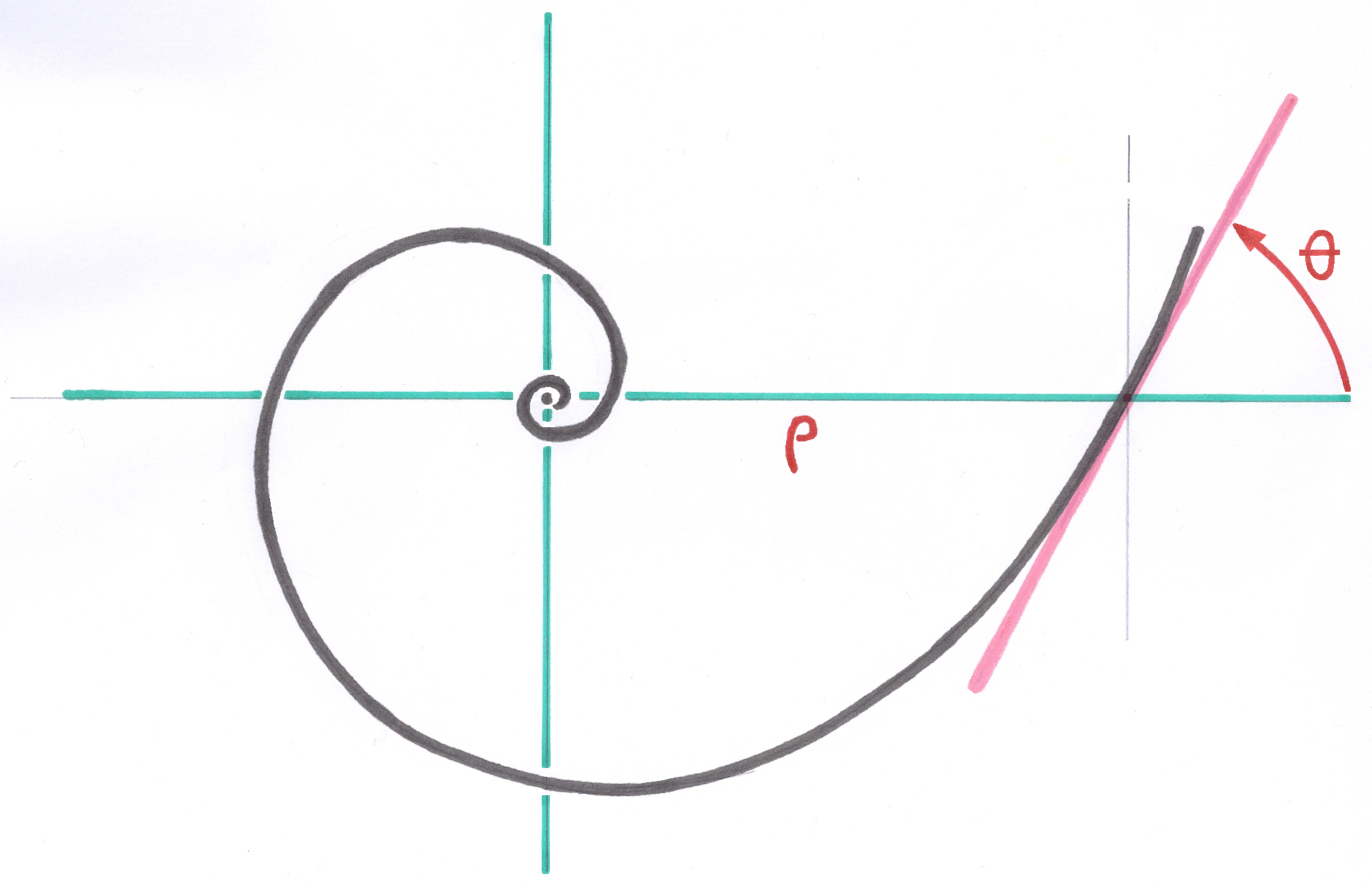
5.4.4. La géométrie de la Vague Cycloïdale
La forme idéale de cette courbe est celle prise par une vague en pleine mer ou houle en eau profonde (comme la houle de Gerstner), La Vague Cycloïdale ( en réalité hypocycloïde ou trochoïde ) est une courbe générée par un point à l'intérieur d'un cercle roulant sans glissement sur une ligne droite. La formule générale est de la forme:
x(t)=r(t-sin(t))
y(t)=r(1-cos(t)) à compléter par AD
Bibliographie: Jacques Bouteloup, Vagues, marées, courants marins, PUF,1950
H.Bouasse, Houles, rides, seiches et marées, Delagrave, 1924.
Houle de Gerstner, formules mathématiques.
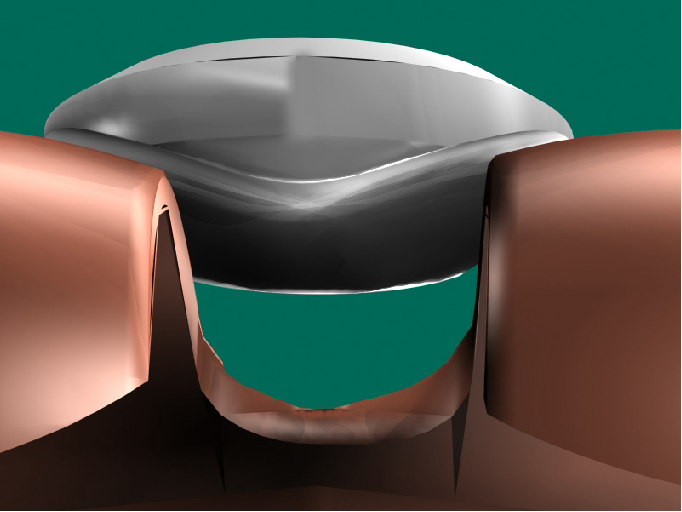
5.4.5. Constitution de la surface de glissement du fémur
La courbe de la Vague Cycloïdale est projetée par calcul en chaque point de la courbe du profil des condyles fémoraux, perpendiculairement à chaque segment en chaque point. On obtient ainsi une surface approchant de très près la surface naturelle du fémur, tout en étant réalisable en finition par meulage de profil ou rectification numérique.
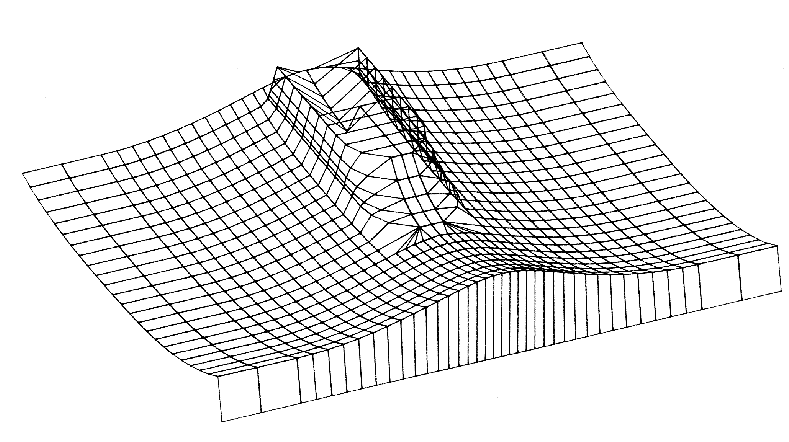
Profil en vague cycloïdale de la surface de glissement Il faut remarquer la remontée latérale et médiale de la vague, qui participe au rappel au centre automatique face au plateau tibial qui présente une remontée semblable.
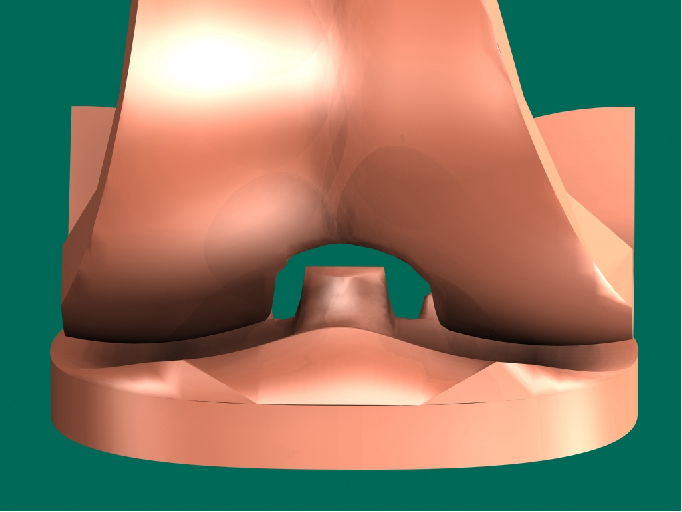
5.4.6. Le bouclier de guidage rotulien est vertical
Le chemin imposé à la rotule est parfaitement vertical, c'est-à-dire perpendiculaire au plan des condyles. Quand on observe les mouvements de la rotule naturelle, ils sont verticaux, sauf quand le quadriceps est complètement détendu et le ligament rotulien relâché, et qu'on observe un léger mouvement médial de la rotule. Je pense que ce petit mouvement peut être négligé pour la prothèse, si le guidage est suffisant.

Surface de glissement du fémur en céramique
5.4.7. La prothèse tibiale est également en forme de Vague Cycloïdale
La surface de glissement du plateau tibial est en forme de Vague Cycloïdale avec les côtés légèrement relevés, comme la continuation latérale et médiale de la vague. En antéro-postérieur, la surface suit la même forme que le fémur, un peu agrandie pour permettre de légers mouvements libres qui sont entraînés par la structure légèrement modifiée par l'opération des divers ligaments du genou.
L'écart entre le fémur et le tibia sera affiné pour permettre à chaque plateau tibial de recevoir un implant fémoral d'une taille inférieure ou d'une taille supérieure à la taille nominale.
Surface de glissement du tibia avec profil en vague cycloïdale
5.4.8. Guidage central du tibia
Une butée centrale limite les débattements entre le plateau tibial et l'implant fémoral. Elle permet notamment une certaine liberté en rotation, ce qui évite à cette prothèse la complexité d'un système mécanique d'axe de rotation. D'ailleurs les implants permettant la rotation n'ont de ce fait pas de libertés de mouvement complémentaires. Ces implants n'ont pas non plus de géométrie de rappel multiaxial.
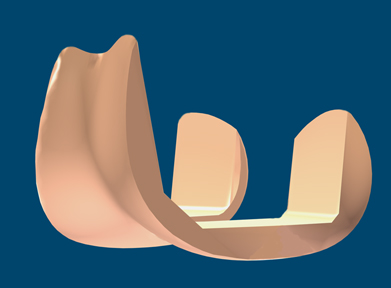
La butée centrale limite les écarts du fémur vers l'arrière, mais en douceur,avec une fonction de retour naturel grâce à la pente en arc vers l'avant.
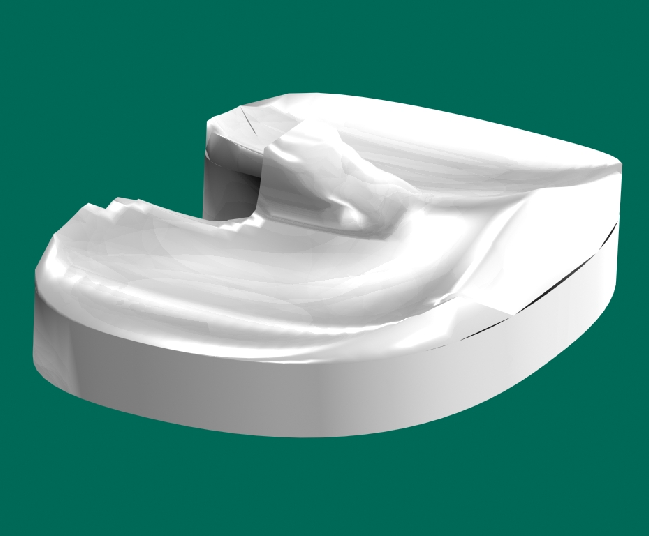
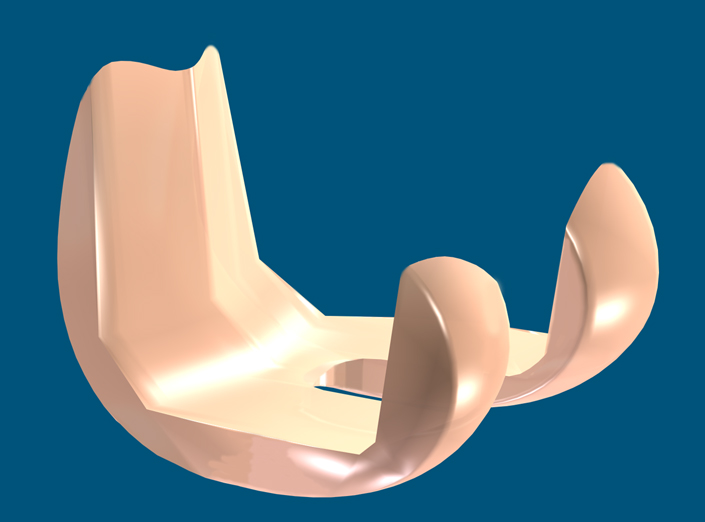
Image de synthèse du plateau tibial en polyéthylène
5.4.9. L'échancrure postérieure
Cette échancrure laisse une petite place pour un résidu éventuel de ligament croisé
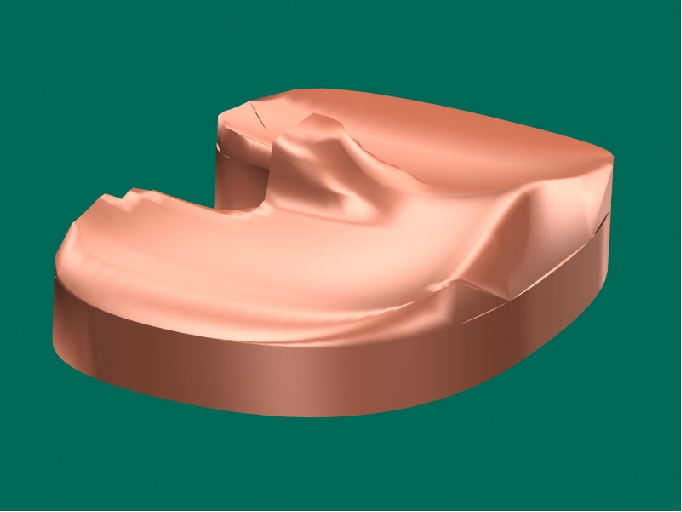
Image de synthèse du plateau tibial en céramique
5.4.10. L'implant rotulien
L'implant rotulien reçoit la même géométrie que le fémur et le tibia, c'est-à-dire un profil en forme de Vague Cycloïdale, très proche de celui de l'implant fémoral. La courbure sagittale est un bon compromis entre les courbures variables du fémur, permis par la petite dimension de cet implant rotulien.
Représentation graphique de la surface de glissement en vague cycloïdale de la prothèse rotulienne
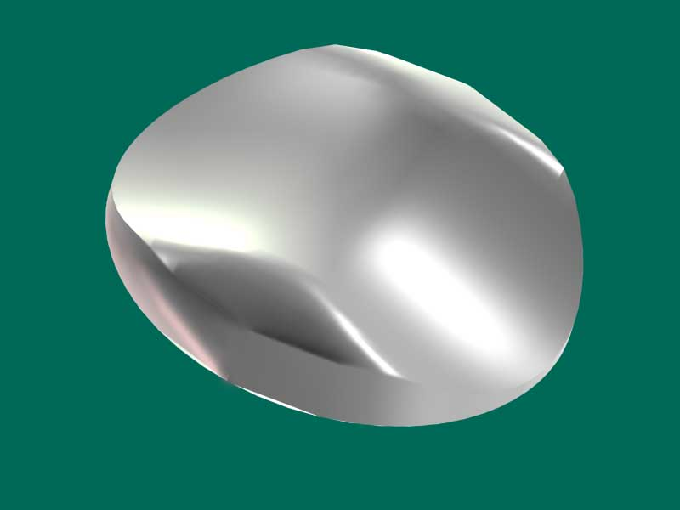
Image de synthèse de la prothèse rotulienne en polyéthylène
5.4.11. Effet de rappel au centre de l'implant rotulien
Du fait du dessin en vague très proche du fémur réel, et pour des décentrages relativement larges, la rotule est recentrée.
Le profil en vague cycloïdale recentre la rotule automatiquement
5.4.12. La rotule reste guidée.
Pour tout degré de flexion du genou, la rotule reste centrée dans son sillon
Le centrage se produit en toute positon de la rotule
Le centrage a lieu jusqu'en flexion extrême
5.4.13 Assemblage très stable de la prothèse fémorale sur l'os
Tous les plans de jonction entre le fémur déjè préparé et l'implant fémoral appartiennent au même cône géométriquement exact, et toutes les génératrices de toutes les surfaces de fixation convergent au même point sur l'axe d'impaction. C'est loin d'être le cas pour la plupart des prothèses de genou actuelles.
Si les plans de compression ne font pas partie d'un cone, alors les pressions et les compressions dynamiques en cours d'impaction ne sont pas régulièrement réparties, et l'implant dévie de sa position théorique planifiée et peut dévier et même fissurer un condyle.
La présence de chevilles de fixation qui ne seraient pas dans l'alignement avec l'axe théorique du cône contribue à la dégradation du spongieux et contrarie la bonne impaction. C'était justement le cas de l'ancienne prothèse d'AlloPro étudiée plus haut, qui était dessinée et non calculée.
Dans la prothèse de la présente conception, ces chevilles ou plots de fixation ne sont plus nécessaires. Une légère structuration de surface de plans de compression est indispensable. Il faut également prévoir une petite Réserve d'Impaction ( voir Lexique 6.1.)
Modèle graphique de la jonction conique avec l'os du femur
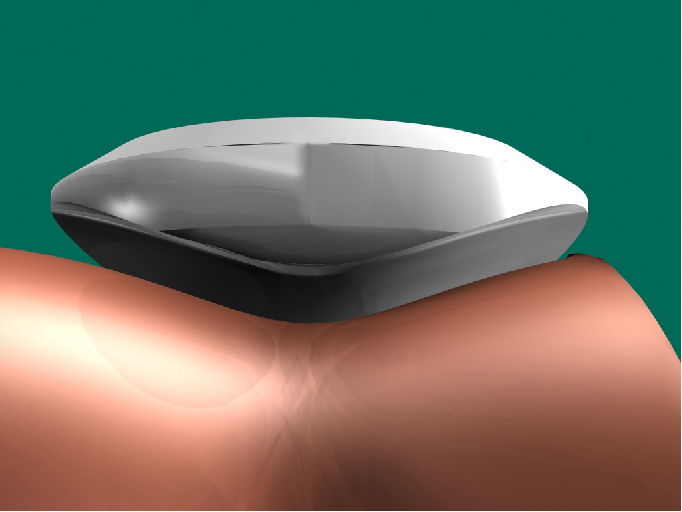
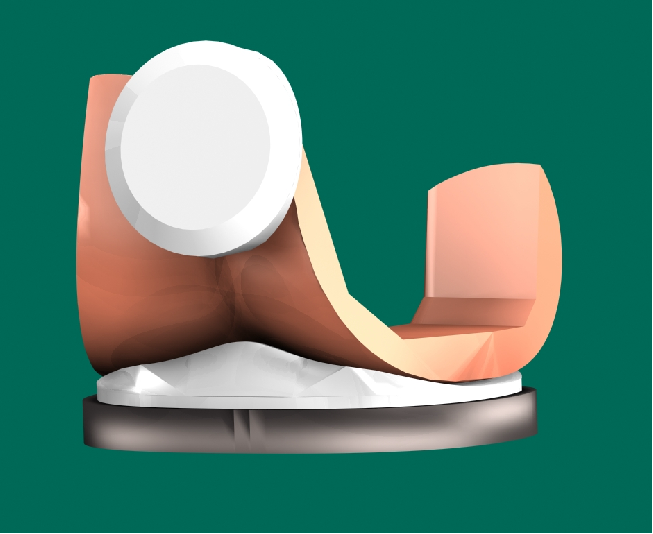
5.4.14.
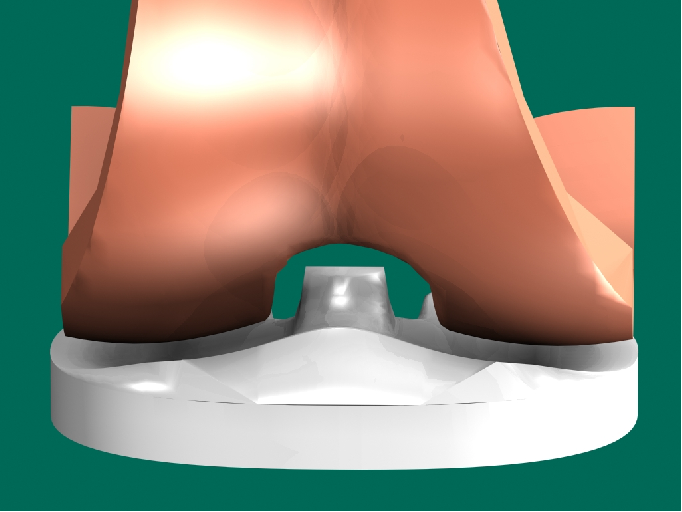
Exemple tibia polyéthylène et fémur céramique
5.4.15.
Exemple éventuel tibia et fémur céramique
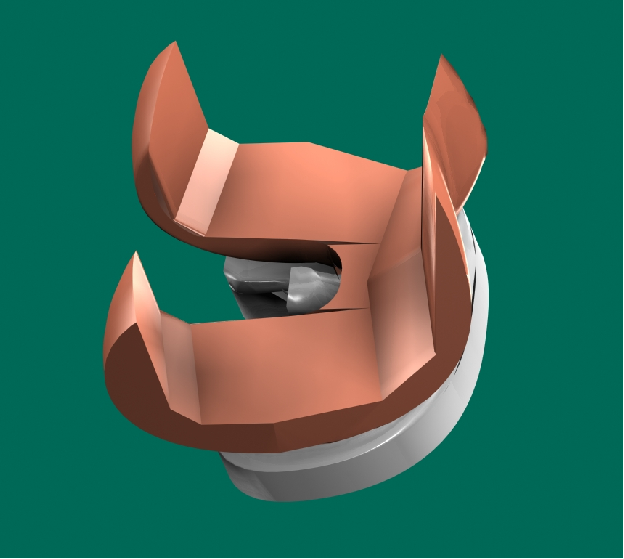
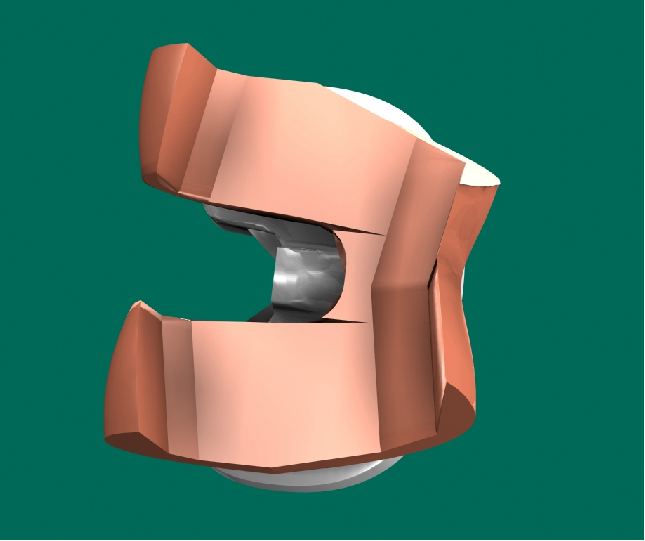
5.4.16.

Prothèse fémorale de côté, la jonction mathématiquement conique ne nécessitant pas de système de fixation supplémentaire
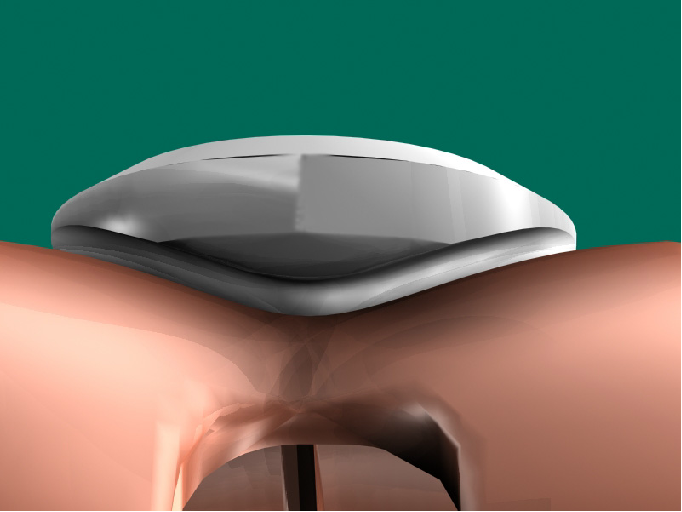
5.4.17.
Le système permet quelques degrés d'hyperextension
5.4.18.
Le glissement permet un petit mouvement en "tiroir"
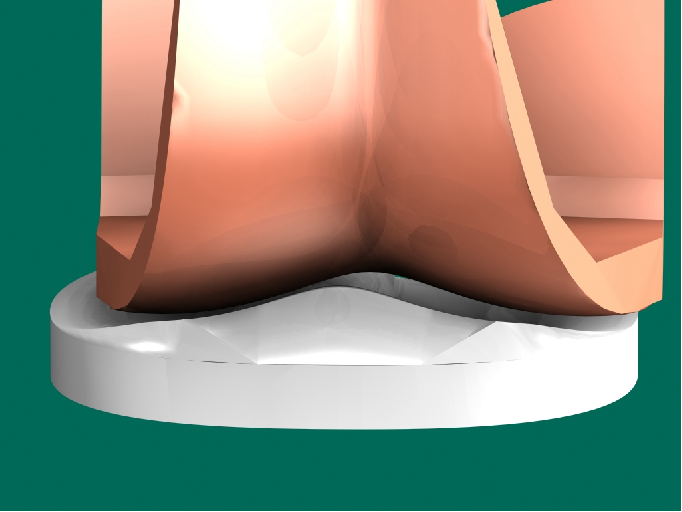
5.4.19.
Du fait des rayons de courbure calculés, la prothèse cherche automatiquement à se recentrer en antéro-postérieur, c'est à dire en parfaite extension
5.4.20.

Grâce au profil en vague cycloïdale, un rappel automatique au centre a lieu après un léger décalage médial du tibia
5.4.21.
Rappel au centre après petit décalage latéral du tibia
5.4.22.
Rappel sagittal automatique après rotation interne ou externe
5.4.23.
Vue verticale de la jonction conique os-prothèse rigoureusement calculée. Les plans de serrage conique antéro-postérieur sont dirigés dans la direction de chaque condyle, pour éviter tout risque de fissure.
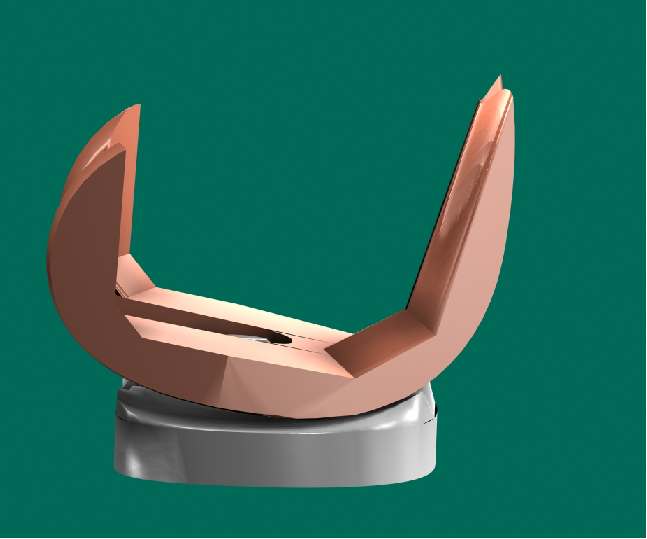
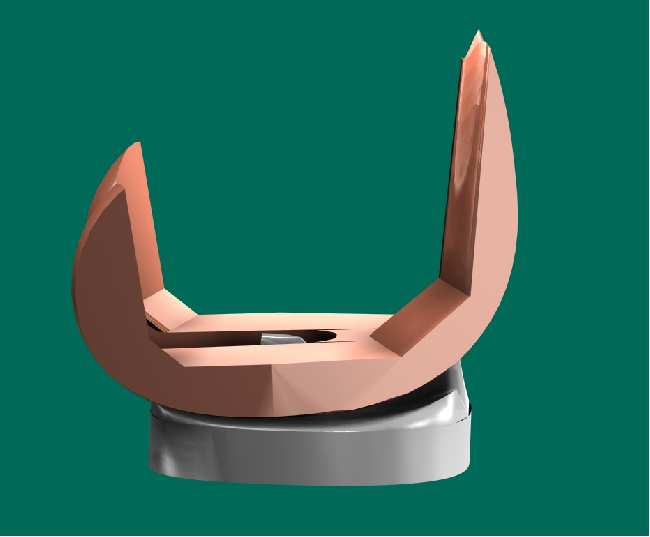
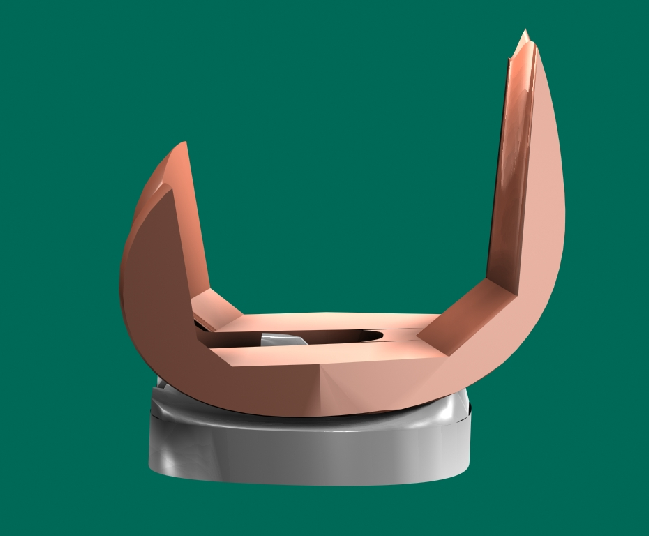
5.4.24.
Plateau de glissement tibial polyéthylène avec embase en titane (avant représentation du système de fixation tibial indispensable)
5.4.25.
Vue soulevée montrant la vague cycloïdale de recentrage
5.4.26.
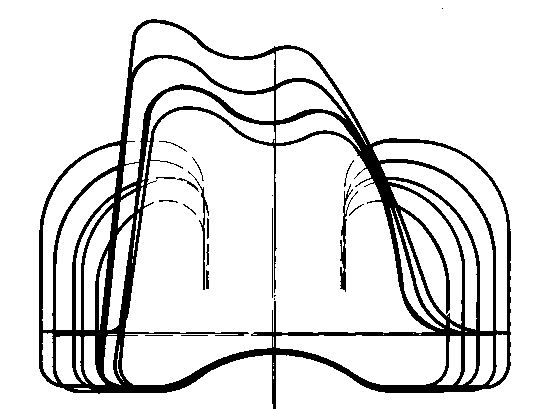
Fémurs superposés de face d'un ancien genou Allo Pro On observe une variation de l'obliquité du guidage rotulien, un dessin commun du glissement distal pour toutes les tailles, des variations incontrôlées du dessin du contour antérieur
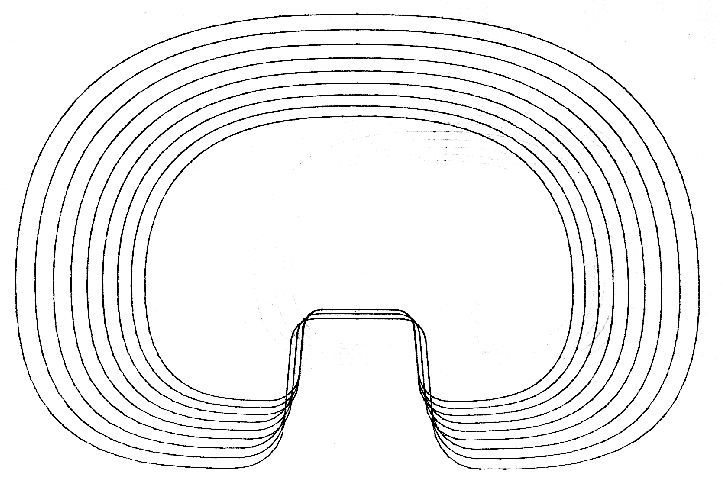
5.4.27.
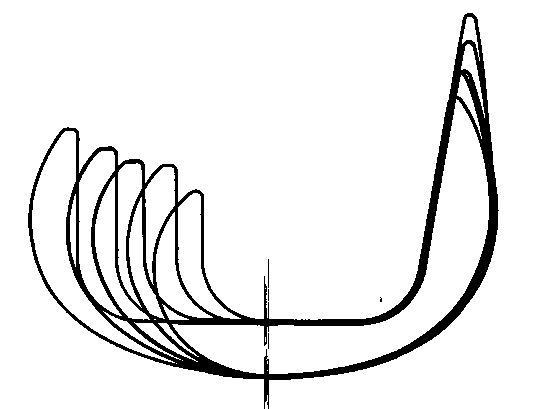
Fémurs superposés de côté d'un ancien genou Allo Pro On observe une épaisseur constante de la base des implants. Le virage postérieur de la plus petite taille a une épaisseur double du virage de la plus grande taille. Seule la partie antérieure est inclinée, la partie postérieure est verticale. C'est très loin d'une jonction conique. En plus les tiges d'ancrage, non représentées ici, entraînent une descente verticale. La fixation est impossible sans dégâts.
5.4.28.
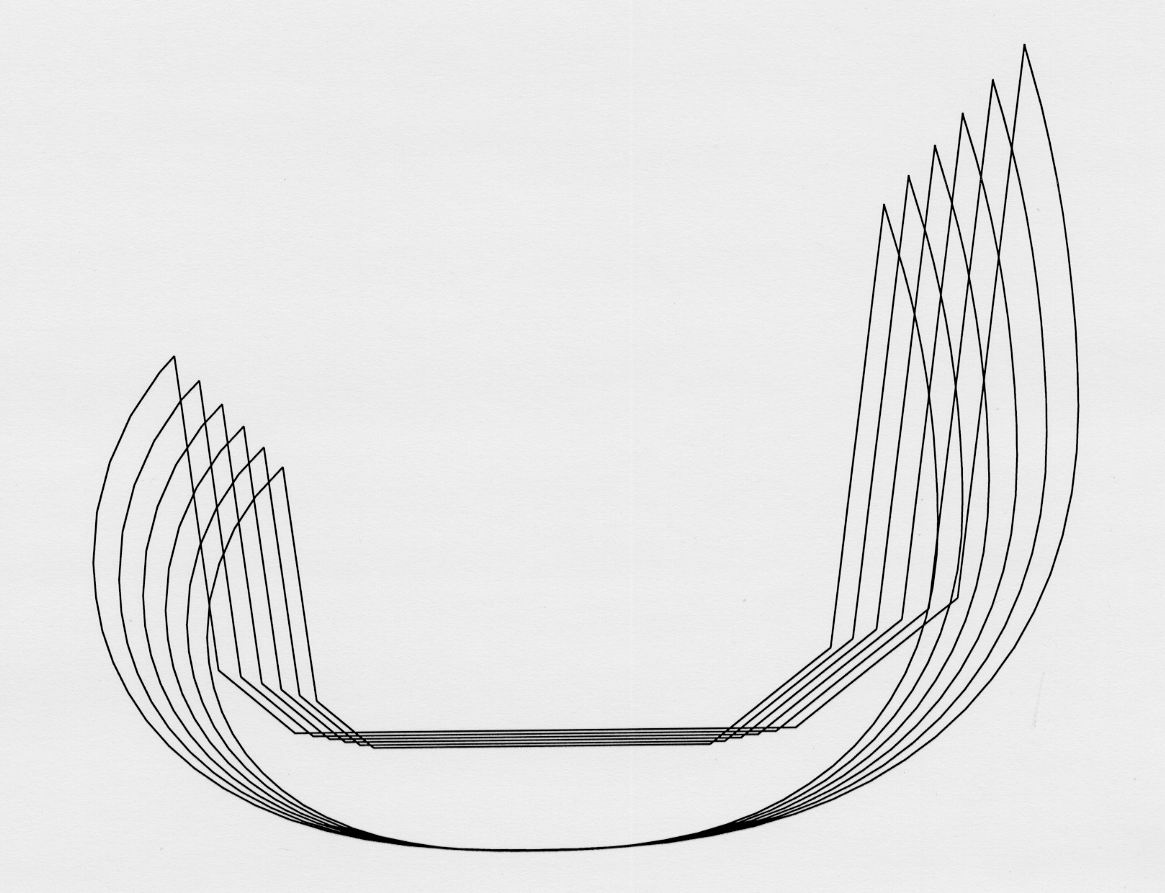
Fémurs superposés de côté d'un genou DECKNER, en tailles optimisées calculés par la méthode des facteurs de croissance. Dans toutes les directions, en tous points,la croissance entre les tailles est régulière et exponentielle au sens mathématique. L'épaisseur ditale est légèrement variable. Les surfaces d'appui antérieures et postérieures s'éloignent simultanément.
5.4.29.
Contours des embases des plateaux tibiaux calculés par la méthode des tailles optimisées. La hauteur des périphéries et l'épaisseur du métal des fonds est également variable, avec des Facteurs de Croissance indépendants.
5.4.30.
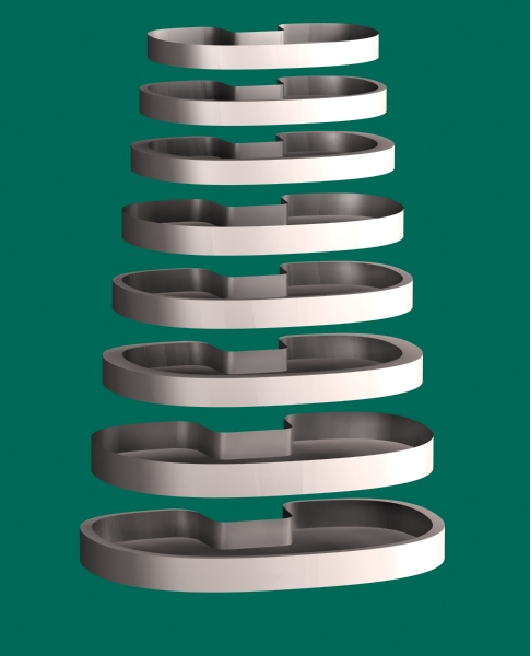
Les 7 embases reçoivent seulement 3 plateaux tibiaux Exemple avant représentation du système de fixation tibiale
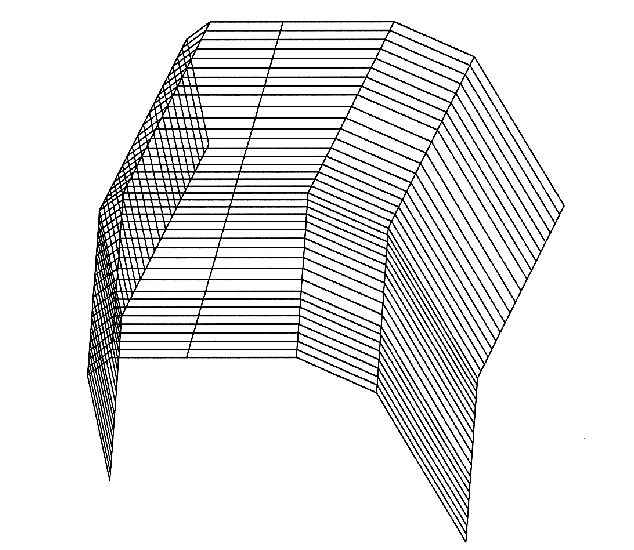
5.4.31.
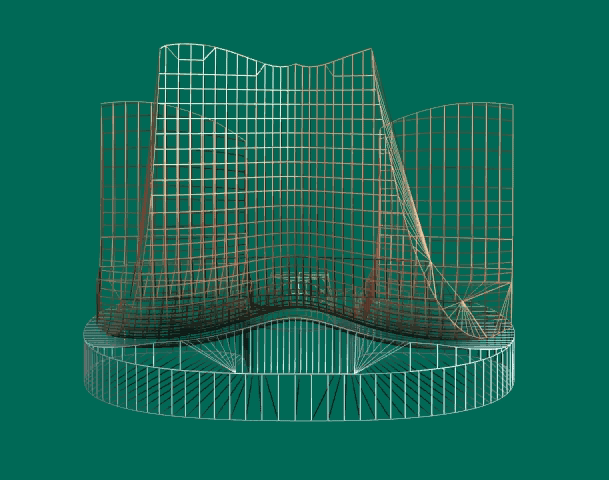
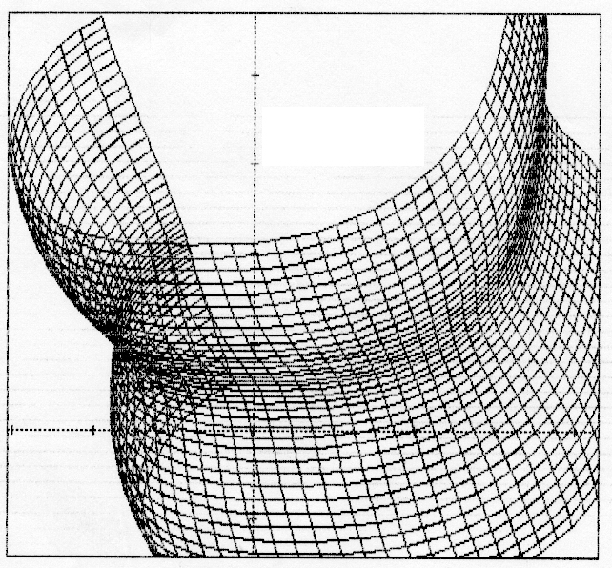
Vue de face en maillage calculé du couple tibia-fémur
5.4.32.
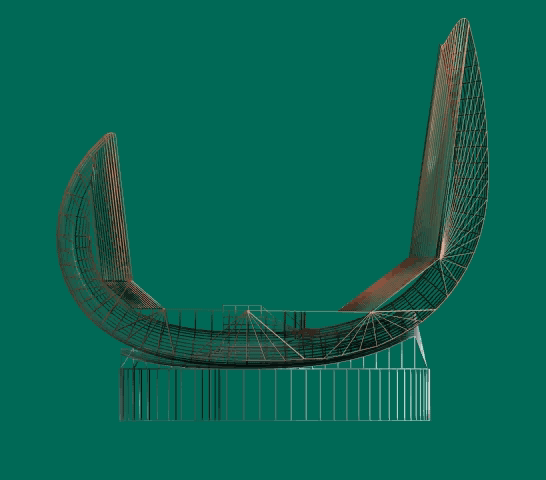
Vue de côté du maillage calculé du couple tibia-fémur
5.4.33.
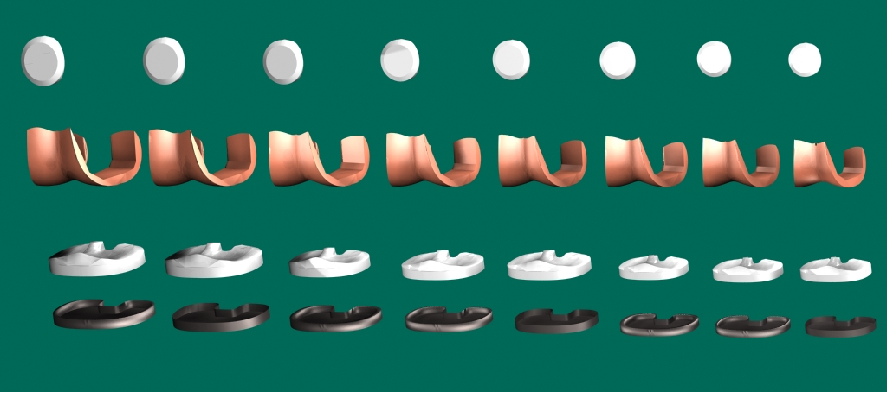
Exemple de système complet: 8 embases tibiales en titane, trois plateaux tibiaux en polyéthylène, 8 pièces fémorales en céramique, et 3 rotules en PE
5.4.34.
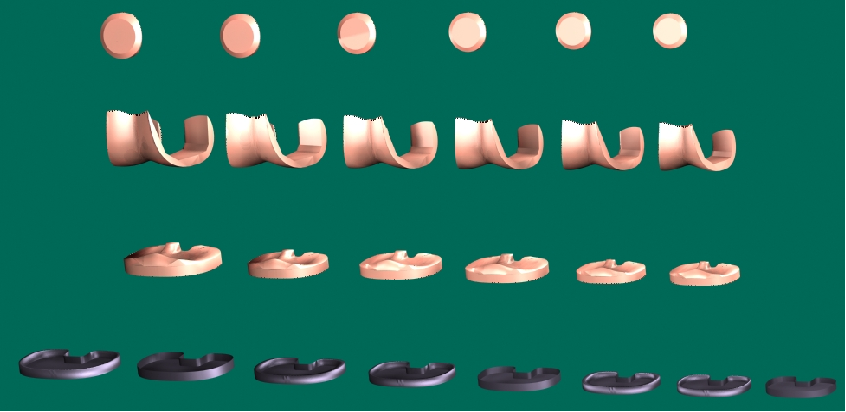
Example of a complete system: 8 titanium tibial bases, three polyethylene tibial trays, 8 ceramic femoral parts, and 3 PE ball joints
---
Chapitre suivant: 5.5. Instruments
Alésoir Spiral pour tiges Modular
Table des matières tabmat